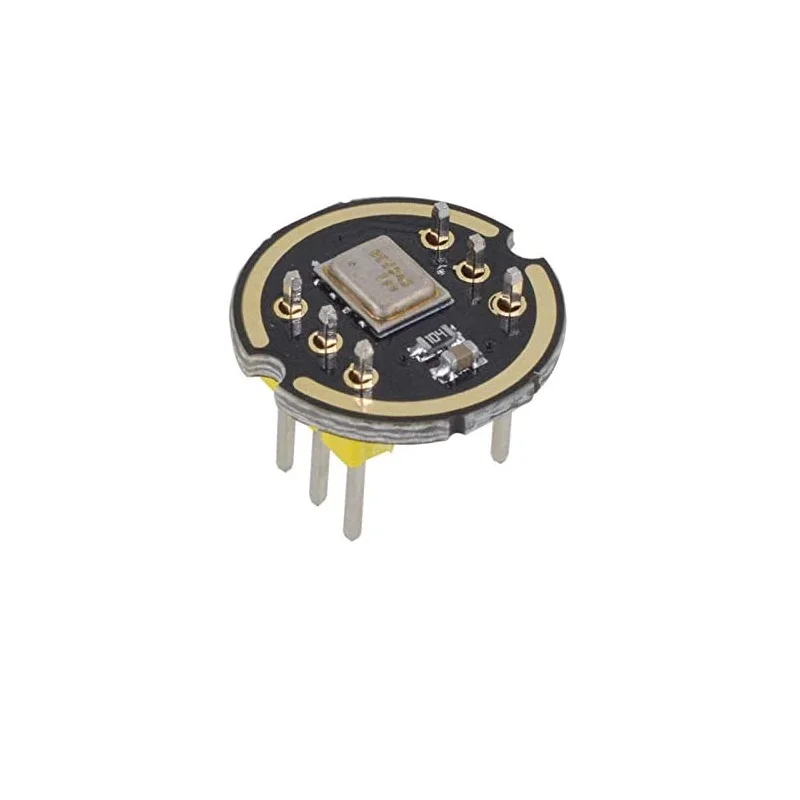
[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/e1/up/4n.jpg)
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/h4/hm/6v.webp)
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/ex/0g/o1.jpg)
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/da/99/ct.jpg)
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/e7/bh/1v.jpg)
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/al/f9/af.jpg)
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/ls/si/ea.jpg)
![[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS](https://dm.lnwfile.com/_/dm/_raw/1k/k2/a7.jpg)
| รหัสสินค้า | B93 |
| หมวดหมู่ | Sound Module / Buzzer |
| ราคา | 110.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 25 ม.ค. 2566 |
| อัพเดทล่าสุด | 22 ส.ค. 2568 |
| คงเหลือ | 73 ชิ้น |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
[บัดกรีขาแล้วพร้อมใช้] INMP441 โมดูลไมโครโฟนรอบทิศทาง Omnidirectional Microphone Module I2S Interface MEMS
INMP441 Feature:
1. The microphone module has a 24‑bit digital I2S interface with high‑ data, and the output performance is stable.
2. With flat broadband frequency response and high signal‑to‑noise ratio, it can produce high‑definition natural sound.
3. INMP441 is a high-performance, low-power, digital output omnidirectional MEMS microphone with a bottom port.
4. With MEMS sensor, signal conditioning, analog‑to‑digital converter, anti‑aliasing filter, power management and I2S interface.
5. The microphone outputs the signal on the left channel when the level is low, and outputs the signal on the right channel when the level is high.
INMP441 Omnidirectional Microphone Specification:
- Item Type: Microphone Module
- Interface Definition:
- SCK: Serial data clock of I2S interface
- WS: Select serial data for I2S interface
- L/R: Left/right channel selection
- When set to low level, the microphone outputs signals on the left channel
- When set to high level, the microphone outputs the signal on the right channel
- SD: Serial data output from I2S interface
- VCC: Input power, 1.8V-3.3V
- GND: Power supply
With flat broadband frequency response and high signal‑to‑noise ratio, it can produce high‑definition natural sound.
INMP441 is a high-performance, low-power, digital output omnidirectional MEMS microphone with a bottom port.
The microphone module has a 24‑bit digital I2S interface with high‑ data, and the output performance is stable
ตัวอย่างโค้ต INMP441
Connect to ESP32: INMP441 ESP32
SCK >> GPIO14
SD >> GPIO32
WS >> GPIO15
L/R >> GND
GND >> GND
VDD >> VDD3.3
ตัวอย่างโค้ต INMP441
Connect to ESP32: INMP441 ESP32
SCK >> GPIO14
SD >> GPIO32
WS >> GPIO15
L/R >> GND
GND >> GND
VDD >> VDD3.3
#include <driver/i2s.h>
2
#define I2S_WS 15
3
#define I2S_SD 13
4
#define I2S_SCK 2
5
6
#define I2S_PORT I2S_NUM_0
7
8
void setup() {
9
Serial.begin(115200);
10
Serial.println("Setup I2S ...");
11
12
delay(1000);
13
i2s_install();
14
i2s_setpin();
15
i2s_start(I2S_PORT);
16
delay(500);
17
}
18
19
void loop() {
20
int32_t sample = 0;
21
int bytes = i2s_pop_sample(I2S_PORT, (char*)&sample, portMAX_DELAY);
22
if(bytes > 0){
23
Serial.println(sample);
24
}
25
}
26
27
void i2s_install(){
28
const i2s_config_t i2s_config = {
29
.mode = i2s_mode_t(I2S_MODE_MASTER | I2S_MODE_RX),
30
.sample_rate = 44100,
31
.bits_per_sample = i2s_bits_per_sample_t(16),
32
.channel_format = I2S_CHANNEL_FMT_ONLY_LEFT,
33
.communication_format = i2s_comm_format_t(I2S_COMM_FORMAT_I2S | I2S_COMM_FORMAT_I2S_MSB),
34
.intr_alloc_flags = 0, // default interrupt priority
35
.dma_buf_count = 8,
36
.dma_buf_len = 64,
37
.use_apll = false
38
};
39
40
i2s_driver_install(I2S_PORT, &i2s_config, 0, NULL);
41
}
42
43
void i2s_setpin(){
44
const i2s_pin_config_t pin_config = {
45
.bck_io_num = I2S_SCK,
46
.ws_io_num = I2S_WS,
47
.data_out_num = -1,
48
.data_in_num = I2S_SD
49
};
50
51
i2s_set_pin(I2S_PORT, &pin_config);
52
}
วิธีการชำระเงิน
-
ชำระเงินค่าสินค้าโดยการโอนเงินเข้าบัญชีด้านล่าง โดยลูกค้าสามารถโอนเงินหลังทำรายการสั่งซื้อได้ทันทีไม่ต้องรอยืนยัน
-
หลังจากโอนเงินแล้วสามารถแจ้งชำระเงินได้ที่ เมนูแจ้งชำระเงิน
หรือชำระเงินผ่าน PayPal โดยคลิกที่ ชำระเงินออนไลน์
ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



ดิศรณ์ ตันติเกตุ
098-xxxxxx-2
Accept All Banks | รับเงินได้จากทุกธนาคาร
ชำระเงินออนไลน์
- ค่าธรรมเนียม 3.9% + 11 THB
- การชำระผ่าน PayPal คุณไม่จำเป็นต้องแจ้งชำระเงิน เนื่องจากระบบจะจัดการให้คุณทันที ที่คุณชำระเงินเสร็จสมบูรณ์


- พิมพ์ “GenLogic” ในช่อง Search
- หรือเข้าจากรายการร้านค้าโปรดของฉัน
เข้าร่วมร้านค้า Arduino4
ร้านGenLogic
/www.genlogic.co.th/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ

▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

GenLogic
ขายบอร์ด Arduino และอุปกรณ์อื่นๆ ที่ใช้ร่วมกับ Arduino รวมถึง Microcontroller, Module, Breakout board, Sensor และอุปกรณ์อิเล็กทรอนิกส์ต่างๆ ในราคาถูก เหมาะสำหรับผู้ที่สนใจเกี่ยวกับ Arduino และการโปรแกรมระบบ Microcontroller และอิเล็กทรอนิกส์ทั่วไป และทำโปรเจคต่างๆ ร้านมีสินค้าสต็อกพร้อมจัดส่ง จัดส่งสินค้ารวดเร็วภายใน 1-2 วันทำการเท่านั้น
เบอร์โทร :
อีเมล : sale@genlogic.co.th
อีเมล : sale@genlogic.co.th
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม